
Après avoir entraîné la capacité d’imagination visuelle d’une Intelligence artificielle (IA), capable de reconstituer des visages à partir d’échantillons vocaux, des scientifiques du Massachusetts Insitute of Technology (MIT) se sont mis en tête d’enseigner aux robots le sens du toucher.
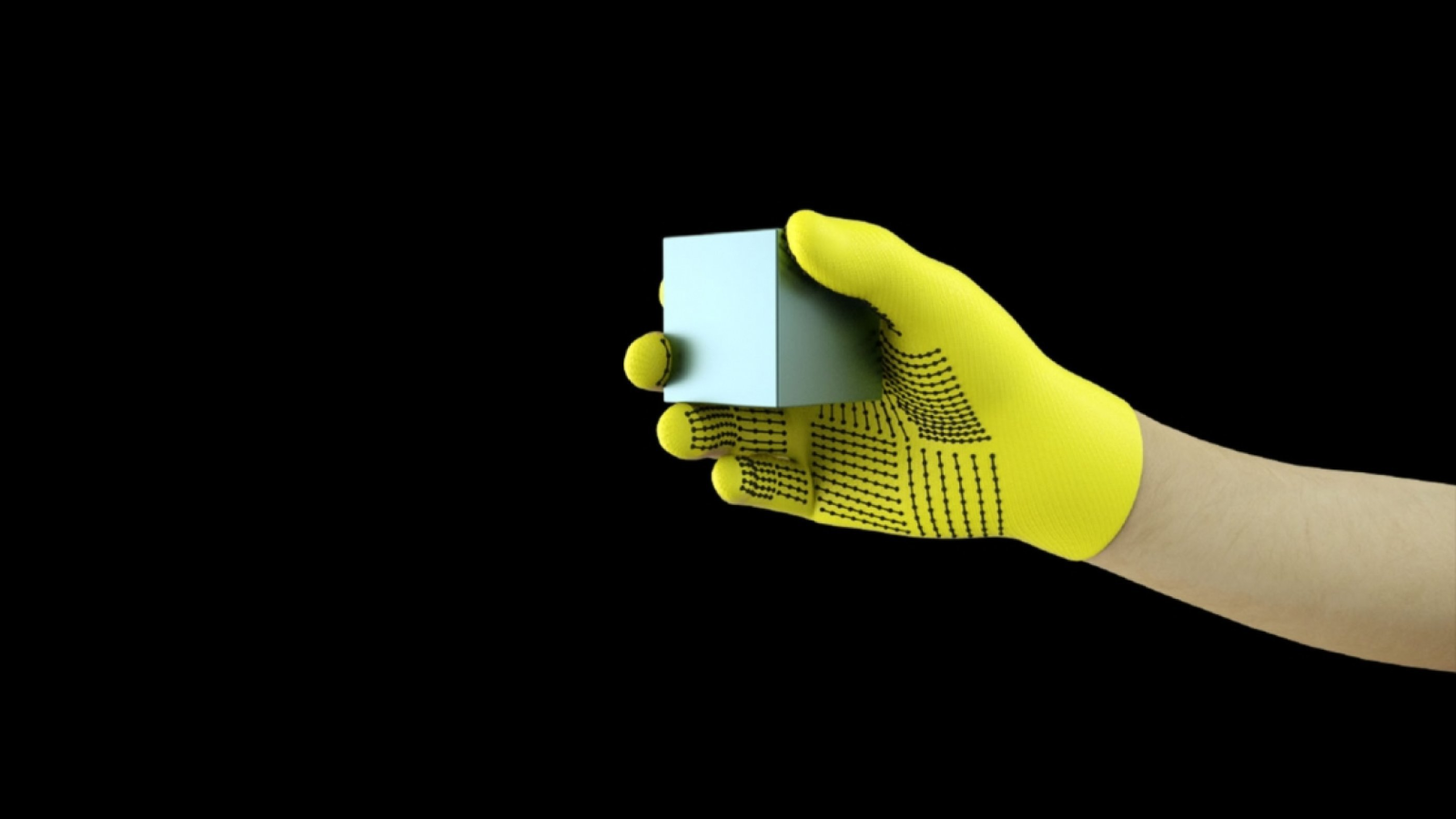
« Les réseaux mécanorécepteurs qui permettent la rétroaction sensorielle et rendent possible la dextérité nécessaire pour empoigner demeure difficile à répliquer chez les robots », peut-on lire dans un article paru en mai dans la revue Nature. Qu’à cela ne tienne, une équipe du MIT espère apprendre à un ordinateur comment « identifier des objets individuels, estimer leur poids et explorer les motifs tactiles typiques qui émergent lorsque l’on empoigne un objet », à l’aide d’un gant muni de pas moins de 548 senseurs et d’un réseau de neurones artificiels.
Contrairement aux approches misant sur la coordination visuelle et motrice explorée jusqu’à maintenant pour développer la capacité de l’IA à manipuler des objets, ce nouveau mécanisme de captation sensorielle représente une occasion sans précédent d’apprendre à des machines comment faire usage d’information tactile pour rendre leurs manipulations… plus humaines.
Vous aimerez aussi
-
 Santé : quand l’IA perpétue les préjugésVendredi 17 juillet 2026
Santé : quand l’IA perpétue les préjugésVendredi 17 juillet 2026 -
 Des détecteurs d’IA à la crédibilité défaillanteJeudi 9 juillet 2026
Des détecteurs d’IA à la crédibilité défaillanteJeudi 9 juillet 2026 -
 Escher, la science du 20e et la technologie du 21e siècleMercredi 24 juin 2026
Escher, la science du 20e et la technologie du 21e siècleMercredi 24 juin 2026 -
 Scientifiques face à l’IA: pessimistes mais résignésMercredi 10 juin 2026
Scientifiques face à l’IA: pessimistes mais résignésMercredi 10 juin 2026 -
 Utiliser des drones pour la biologie moléculaireVendredi 30 janvier 2026
Utiliser des drones pour la biologie moléculaireVendredi 30 janvier 2026 -
 Un robot chirurgien grâce à l’intelligence artificielleMardi 22 juillet 2025
Un robot chirurgien grâce à l’intelligence artificielleMardi 22 juillet 2025
Les plus populaires


